
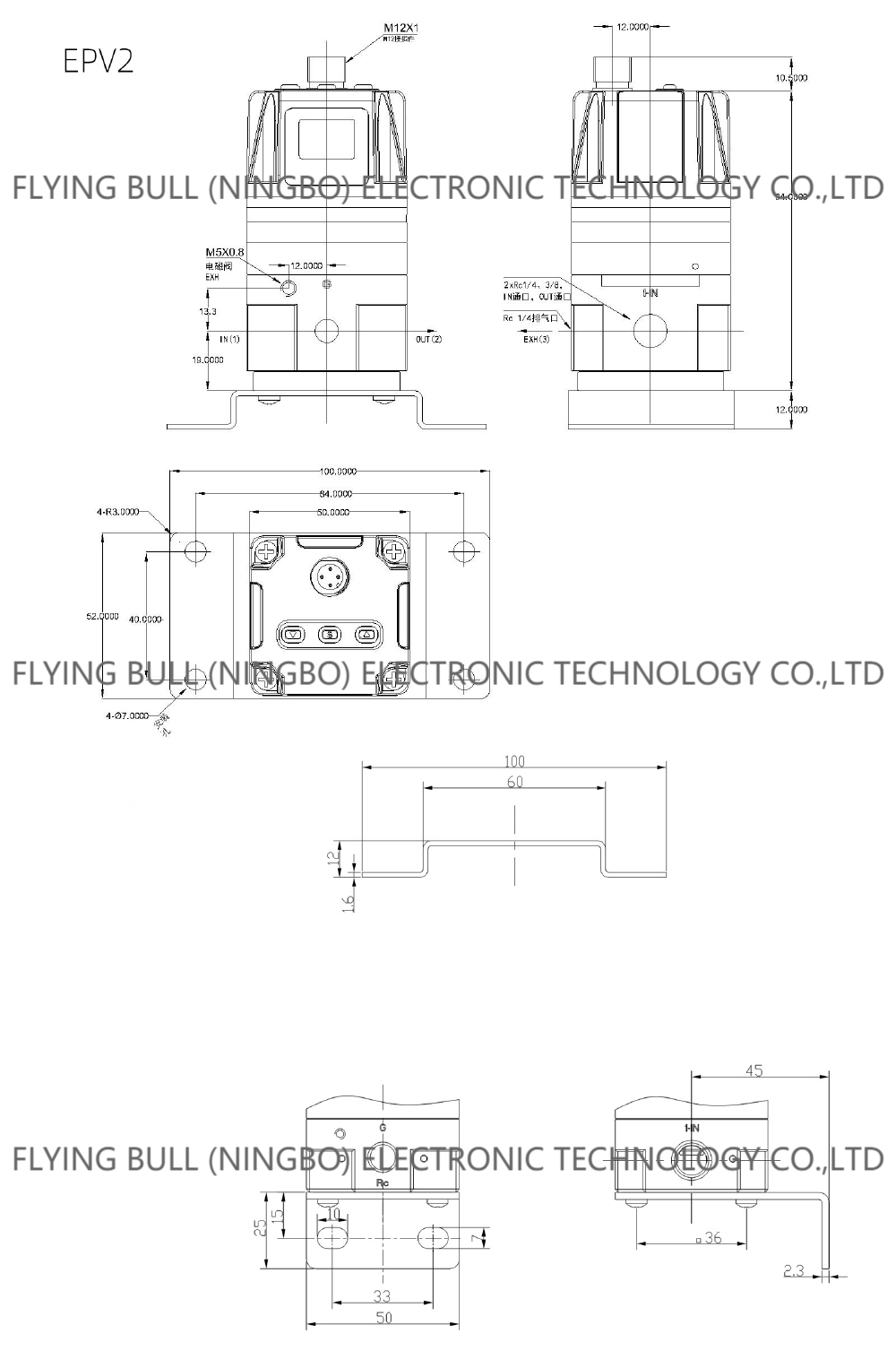
एयर फिल्टर नियामक EPV2 श्रृंखला इलेक्ट्रॉनिक वायवीय अनुपात

विवरण
न्यूनतम आपूर्ति दबाव: दबाव +0.1mpa सेट करें
मॉडल संख्या: EPV2-1 EPV2-3 EPV2-5
प्रेशर रेंज सेट करें: 0.005 ~ 0.5mpa
इनपुट सिग्नल करंट टाइप: DC4 ~ 20MA, DC0 ~ 20MA
इनपुट सिग्नल वोल्टेज प्रकार: DC0-5V, DC0-10V
आउटपुट सिग्नल स्विच आउटपुट: एनपीएन, पीएनपी
डीसी: 24V 10%
डीसी: 24 वी 1.2 ए से कम
इनपुट प्रतिबाधा वर्तमान प्रकार: 250ω से कम
इनपुट प्रतिरोध वोल्टेज प्रकार: लगभग 6.5k।
प्रीसेट इनपुट: DC24VType: About4.7k
एनालॉग आउटपुट: "DC1-5V (लोड प्रतिबाधा: 1k) से अधिक)
DC4-20MA (लोड प्रतिबाधा: 250k andly की तुलना में
6%(एफएस) के भीतर आउटपुट सटीकता "
रैखिक: 1%एफएस
सुस्त: 0.5%एफएस
पुनरावृत्ति: 0.5%एफएस
तापमान विशेषता: 2%एफएस
दबाव प्रदर्शन सटीकता: 2%एफएस
दबाव प्रदर्शन स्नातक: 1000graduation
परिवेश का तापमान: 0-50 ℃
सुरक्षा ग्रेड: IP65
आपूर्ति की योग्यता
बेचना इकाइयाँ: एकल आइटम
एकल पैकेज का आकार: 7x4x5 सेमी
एकल सकल वजन: 0.300 किलोग्राम
उत्पाद परिचय
विद्युत आनुपातिक वाल्व इलेक्ट्रॉनिक नियंत्रण द्वारा प्रवाह के थ्रॉटलिंग नियंत्रण को महसूस करना है। इलेक्ट्रिक कंट्रोल प्रेशर रेगुलेटिंग डिवाइस में एक एयर इनलेट और एग्जॉस्ट रिजाइंटिंग स्विच सोलनॉइड वाल्व, प्रेशर डिटेक्शन सेंसर और एक कंट्रोल सर्किट होता है। जब एक इनपुट सिग्नल होता है, तो सेवन सोलनॉइड वाल्व खोला जाता है, निकास सोलनॉइड वाल्व बंद हो जाता है, मुख्य वाल्व पायलट चैंबर को हवा की आपूर्ति करता है, और मुख्य वाल्व कोर आउटपुट माध्यमिक दबाव में नीचे चला जाता है।
संरचनात्मक सिद्धांत संपादन
जब इनपुट सिग्नल को बढ़ाया जाता है, तो हवा की आपूर्ति के लिए सोलनॉइड वाल्व के पायलट वाल्व 1 को उलट दिया जाता है, और हवा के निकास के लिए सोलनॉइड पायलट वाल्व रीसेट अवस्था में होता है, फिर एयर सप्लाई प्रेशर पायलट चैम्बर 5 को सुपर पोर्ट से जुड़ा हुआ होता है, और पायलट चैंबर में दबाव होता है। खोला गया है और निकास वाल्व कोर 3 बंद है, जिसके परिणामस्वरूप आउटपुट दबाव होता है। यह आउटपुट प्रेशर प्रेशर सेंसर 6 के माध्यम से कंट्रोल सर्किट 8 को वापस खिलाया जाता है। यहां, आउटपुट प्रेशर को लक्षित मूल्य के साथ तुलना में जल्दी से तुलना किया जाता है जब तक कि यह इनपुट सिग्नल के लिए आनुपातिक न हो, ताकि आउटपुट दबाव इनपुट सिग्नल के अनुपात में बदल जाए। क्योंकि कोई नोजल बाफ़ल तंत्र नहीं है, वाल्व अशुद्धियों के लिए असंवेदनशील है और उच्च विश्वसनीयता है।
जब इनपुट सिग्नल को बढ़ाया जाता है, तो हवा की आपूर्ति के लिए सोलनॉइड वाल्व के पायलट वाल्व 1 को उलट दिया जाता है, और हवा के निकास के लिए सोलनॉइड पायलट वाल्व रीसेट अवस्था में होता है, फिर एयर सप्लाई प्रेशर पायलट चैम्बर 5 को सुपर पोर्ट से जुड़ा हुआ होता है, और पायलट चैंबर में दबाव होता है। खोला गया है और निकास वाल्व कोर 3 बंद है, जिसके परिणामस्वरूप आउटपुट दबाव होता है। यह आउटपुट प्रेशर प्रेशर सेंसर 6 के माध्यम से कंट्रोल सर्किट 8 को वापस खिलाया जाता है। यहां, आउटपुट प्रेशर को लक्षित मूल्य के साथ तुलना में जल्दी से तुलना किया जाता है जब तक कि यह इनपुट सिग्नल के लिए आनुपातिक न हो, ताकि आउटपुट दबाव इनपुट सिग्नल के अनुपात में बदल जाए। क्योंकि कोई नोजल बाफ़ल तंत्र नहीं है, वाल्व अशुद्धियों के प्रति असंवेदनशील है और उच्च विश्वसनीयता है।
उत्पाद की तस्वीर
कंपनी का विवरण







कंपनी का लाभ
परिवहन

उपवास






